На этом шаге мы рассмотрим обратное преобразование координат.
Обратное преобразование координат аксонометрической проекции
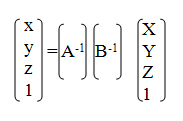
Для того, чтобы координаты проекции (X, Y, Z) преобразовать в мировые координаты (х, у, z), нужно проделать обратную последовательность поворотов. Вначале выполнить поворот на угол -β а затем - поворот на угол -α. Запишем обратное преобразование в матричном виде:
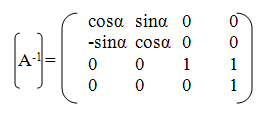
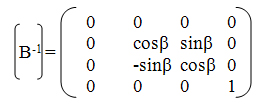
Матрицы поворотов:
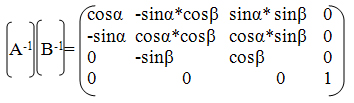
Перемножив матрицы А-1и В-1, получим матрицу обратного преобразования:
Запишем обратное преобразование также и в виде формул:
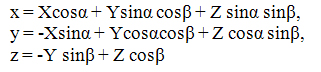
На следующем шаге мы рассмотрим перспективную проекцию.
